Navsight Land /Airシリーズ
- 見積依頼
- お問い合わせ
- 商品カテゴリ
測量用途モーション&ナビゲーションソリューション
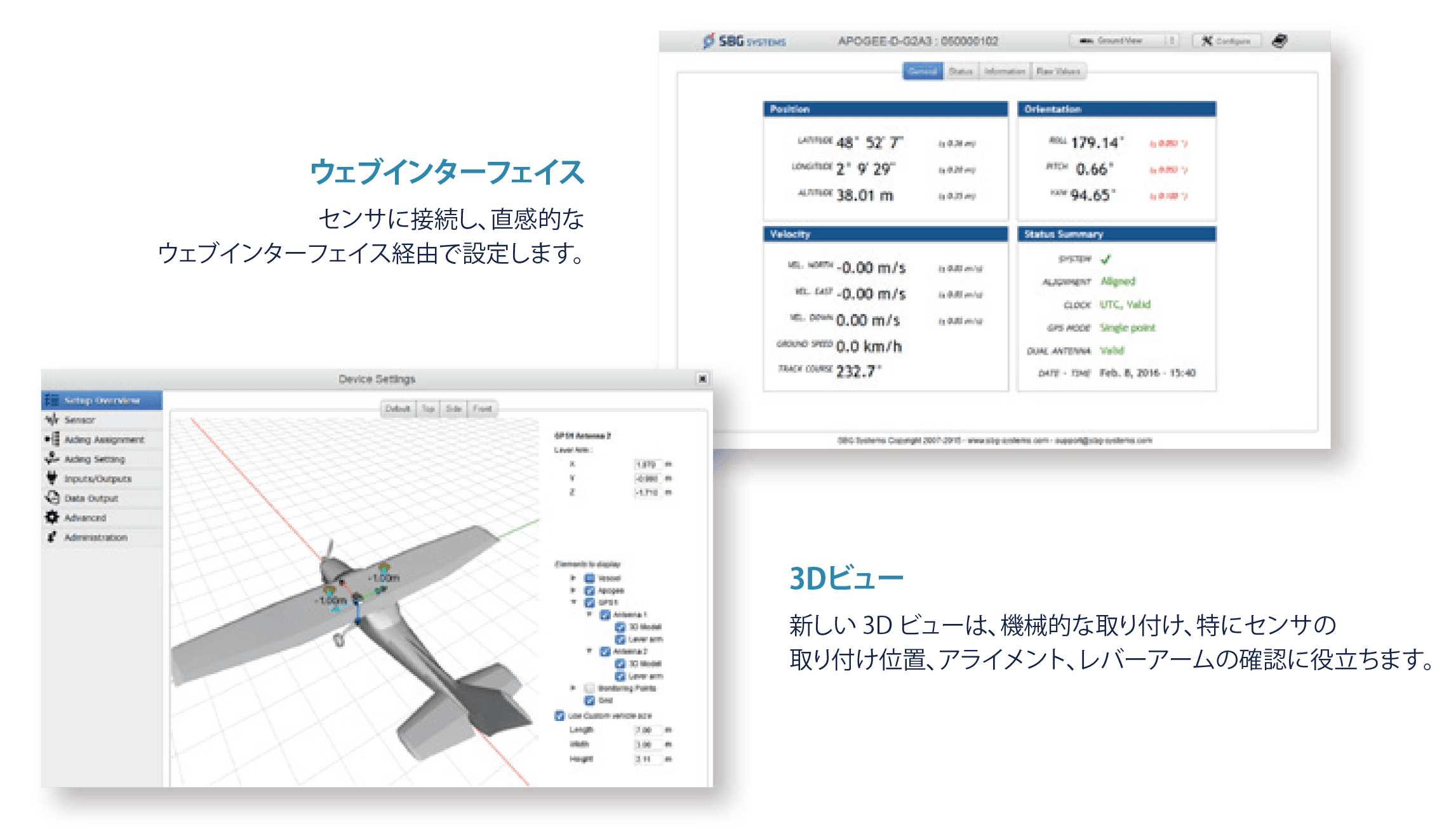
Navsight内部拡張カルマンフィルターで、リアルタイムの慣性、GPS/GNSS、オドメーター(陸上)のデータを融合し、GNSS信号を受け取りにくい過酷な環境(ビルの谷間、トンネル等)でも、強ロバストな強化された位置及び方位計測を実現します。設定は直感的なWEBインターフェイスで簡単に行え、3Dビュー機能で、機械的な設置、センサの位置、アライメントとレバーアームも簡単に確認できます。Navsightは、GNSSレシーバを内蔵したINS、もしくはお手元にあるGNSSレシーバとINSを組み合わせて利用することが可能で、EkinoxやApogeeグレードのIMUから選択して頂けます。

概要
あらゆる条件で信頼性の高い軌道データ
Navsight( ナブサイト)陸上/航空ソリューションは、とても汎用性の高いシステムです。
それは、Navsightに接続する3つの異なる性能レベルから選べる慣性計測ユニットと、統合情報、GNSSレシーバ、そしてLiDAR、カメラ、コンピューターなどの外部装置との接続を組み込んだ丈夫なユニットで構成されています。
Navsight 処理ユニット ‒ データ融合と GNSS
Navsight GPS/GNSSを組み込んだ処理ユニット
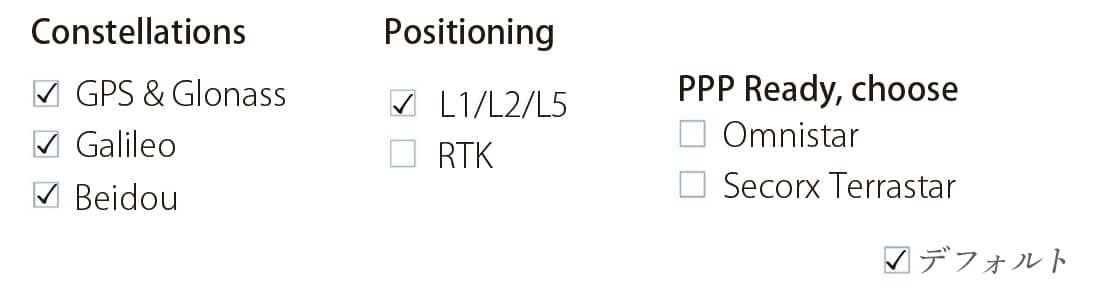
- 3周波レシーバ
- マルチ・コンステレーション
- RTK
- PPP準備済み
- ポスト処理用ロガー内蔵
- 1つまたは2つのアンテナ
Navsight にはお手持ちのGNSSレシーバでも使用できます。

慣性計測ユニット (IMU) ‒ 3種類の精度から選択できます
 |
 |
 |
|
|---|---|---|---|
| Ekinox IMU コンパクトで経済的 |
Apogee IMU コストパフォーマンスに優れてる |
Horizon IMU FOGレベル高精度 IMU |
|
| ロール/ピッチ | 0.015° | 0.005° | 0.004° |
| ヘッディング 陸上 シングルアンテナ | 0.03° | 0.02° | 0.008° |
| ヘディング 航空 シングル/デュアルアンテナ | 0.1° | 0.03° | 0.04° | 0.025° | 0.008° |
| 水平位置 | 1cm+1ppm | 1cm+1ppm | 1cm+1ppm |
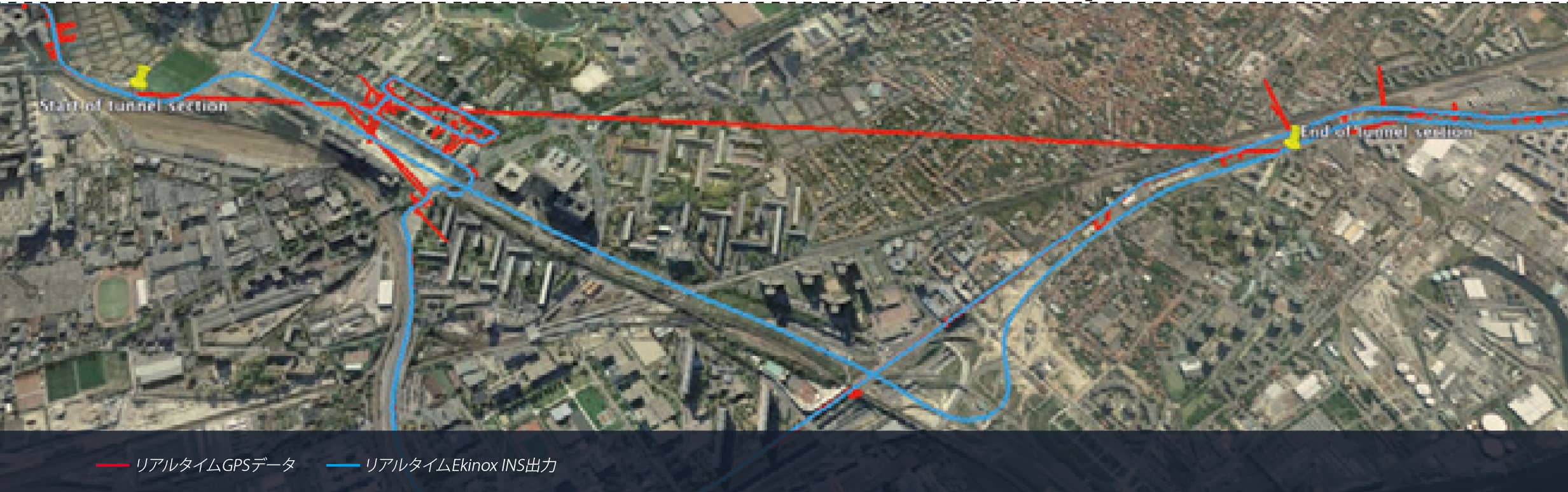
連続位置
慣性データとGNSS情報の連続的な融合により、例えば車両が密集した都市部を通過する際など、効果的にマルチパスや信号遮断の影響を排除し、位置データの出力を安定させます。
ロバストでスムーズな軌道
Navsightは、慣性データとGNSSデータを融合し、高周波数(200Hz)でロバストでスムーズな軌道を提供します。
信号可用性の最大化
より多くの衛星から、より多くの衛星信号を受信するために4つの衛星系を同時に使用しています。
オドメータ 支援
Navsightは、慣性、GNSSとオドメータのデータを融合し、過酷な条件下でのパフォーマンスを更に向上させます。
最新の簡単に使えるインターフェース
ソフトウェア
INS/GNSS ポスト処理ソフトウエア
Qinertiaは、SBGシステムの社内のポスト処理ソフトウエアです。このフル機能のソフトウエアは、GNSS観察値(生データ)と慣性データをポスト処理することにより、SBGの慣性ナビゲーションシステムのパフォーマンスを向上させます。
- 最速の処理
- タイトカップリング INS/GNSS融合
最新の直感的に使えるユーザインターフェース(UI) - +7,000以上の基地局を常に更新
なぜポスト処理 ?
全てのINSとGNSSの生データを前方後方処理する事によって、Qinertia PPKソフトウエアは精度を向上させ、GNSSの信号遮断の影響や設定エラー等々を解決します。
Qinertia があなたの測量を確かなものにし、非常に複雑なエリアの計測も可能にします。

ラインナップ
| 製品名 | Navsight Land/Air Ekinox | Navsight Land/Air Apogee | Navsight Land/Air Horizon |
|---|---|---|---|
| 製品画像 |  |
 |
 |
| 特徴 | モーション&ナビゲーション | より高い精度 | 高精度FOGベースIMU |
| 説明 | 選択可能な3つの異なるパフォーマンスレベルの慣性測定ユニット(IMU)とNavsightとの組み合わせです。 NavsightはフュージョンインテリジェンスとGNSSレシーバ(オプション)を含む堅牢な処理ユニットです。 |
Navsight Apogeeグレードは、GNSSが停止時にも最高のパフォーマンスを発揮し、自動車試験、空中や陸上測量アプリケーションなどチャレンジ的なアプリケーションに最適です。 Navsightソリューションは、ApogeeグレードのIMUセンサとNavsightとの組み合わせです。 |
HorizonIMUは、Navsightを最も高度な測量、高密度エリアでシングルアンテナしか使用できないアプリケーションなど、最も厳しい要求に応えられるセンサです。 HorizonIMUは、超低バイアスとノイズレベルを可能にするクローズドループFOGテクノロジーをベースにしています。これにより、低ダイナミック測量でも、堅牢で安定したパフォーマンスを発揮します。 |
| 仕様 | ・位置精度:1cm(GNSSレシーバによる) ・オドメーターに接続可能 ・QinertiaPPKソフトウェアによる後処理 ・ロール、ピッチ:0.02°(RTK) ・ヘディング:0.05°GNSSベース(4mベースライン) |
・位置精度:1cm(GNSSレシーバによる) ・オドメーターに接続可能 ・QinertiaPPKソフトウェアによる後処理 ・ロール、ピッチ:0.008°(RTK) ・ヘディング:0.025°GNSSベース(4mベースライン) |
・位置精度:1cm(GNSSレシーバによる) ・オドメーターに接続可能 ・QinertiaPPKソフトウェアによる後処理 ・ロール、ピッチ:0.007°(RTK) ・ヘディング:0.01°GNSSベース(シングルアンテナ) |
技術仕様
全てのパラメータは特に明記しない限り -20 から 60°C の温度範囲で適応されます。詳細な仕様を記載したNavsightハードウエアマニュアルをご要望の場合はご連絡ください。
①IMU一覧 ご用途に合ったIMUをお選び下さい。
|
|
|
|
|---|---|---|---|
| IMU | Ekinox-I | Apogee-I | Horizon-I |
| サイズ | 表面 86 x 100 x 58 mm |
表面 130 x 100 x 58 mm |
筐体表面 94 x 94 x 177 mm |
| 重さ | 425 g | 635 g | 1.32 kg |
| 保護等級 | IP68 | IP68 | IP68 |
※OEMバージョンもございます。
| EKINOX | シングルポイント | RTK | PPK | 陸上RTKOutage(60 秒) | PPKOutage(60 秒) |
|---|---|---|---|---|---|
| ロール、ピッチ | 0.03° | 0.02° | 0.03° | 0.2° | 0.05° |
| ヘディング(陸上) | 0.08° | 0.06° | 0.03° | 0.2° | 0.05° |
| ヘディング (航空) シングル | デュアルアンテナ | 0.3° / 0.05° * | 0.2° / 0.05° * | 0.1° / 0.03° | - | - |
| 水平位置 | 1.2m | 1cm+1ppm | 1cm+1ppm | 3 m | 0.4 m |
| APOGEE | シングルポイント | RTK | PPK | 陸上RTKOutage(60 秒) | PPKOutage(60 秒) |
|---|---|---|---|---|---|
| ロール、ピッチ | 0.01° | 0.01° | 0.005° | 0.012° | 0.008 |
| ヘディング(陸上) | 0.04° | 0.04° | 0.02° | 0.06° | 0.025° |
| ヘディング (航空) シングル | デュアルアンテナ | 0.15° / 0.04° * | 0.1° / 0.04° | 0.04° / 0.025 ° | - | - |
| 水平位置 | 1.2m | 1cm+1ppm | 1cm+1ppm | 0.5 m | 0.1 m |
| HORIZON | シングルポイント | RTK | PPK | 陸上RTKOutage(60 秒) | PPKOutage(60 秒) |
|---|---|---|---|---|---|
| ロール、ピッチ | 0.007° | 0.007° | 0.004° | 0.01 | |
| ヘディング(陸上) | 0.01° | 0.01° | 0.008° | 0.015° | |
| ヘディング (航空) シングル | デュアルアンテナ | 0.04° / 0.01° * | 0.04° / 0.01° * | 0.008° | - | - |
| 水平位置 | 1.2 m | 1cm+1ppm | 1cm+1ppm | 0.30 m | 0.05 m |
* 4m ベースライン
②処理ユニットの機能を選択してください。
外部GNSSレシーバによるナビゲーション
インターフェース
| 支援センサ (入力) | 2X GNSS, RTCM |
|---|---|
| プロトコル | 出力: NMEA, ASCII, Binary, TSS, Simrad 入力: NMEA, Trimble, Novatel, Septentrio, Hemisphere, Veripos, Fugro, PD0, PD6 |
| ロギング能力 | 8 GB ≈ 48h, 200 Hz |
| ポート/通信 | 5 x RS-232/RS-422 Tx/Rx ポート |
| 同期 | 2 x 同期 Out (PPS) + 5x 同期 In 信号 |
| イーサネット | 5 仮想シリアルポート 5x UDP / TCP 双方向ポート Web インターフェース , FTP |
組込みGNSSレシーバによるナビゲーション
NAVSIGHT 物理仕様 & 動作環境
| サイズ | 233 x 156 x 63 mm |  |
|---|---|---|
| 重量 | 1.9 kg | |
| 広い入力電圧範囲 (絶縁) | 9 ‒ 36V | |
| EN-60945 コンプライアンス | 絶縁されたインターフェース、電源 | |
| 消費電力 | <3 W, <7W GNSS使用の場合 | |
| 動作温度 | -40 ~ 75°C | |
| MTBF(平均故障時間) | 50,000 時間 |
PDFダウンロード
下記より資料をダウンロードできます。