Ekinoxシリーズ
- 見積依頼
- お問い合わせ
- 商品カテゴリ
タクティカルグレード MEMS慣性システム
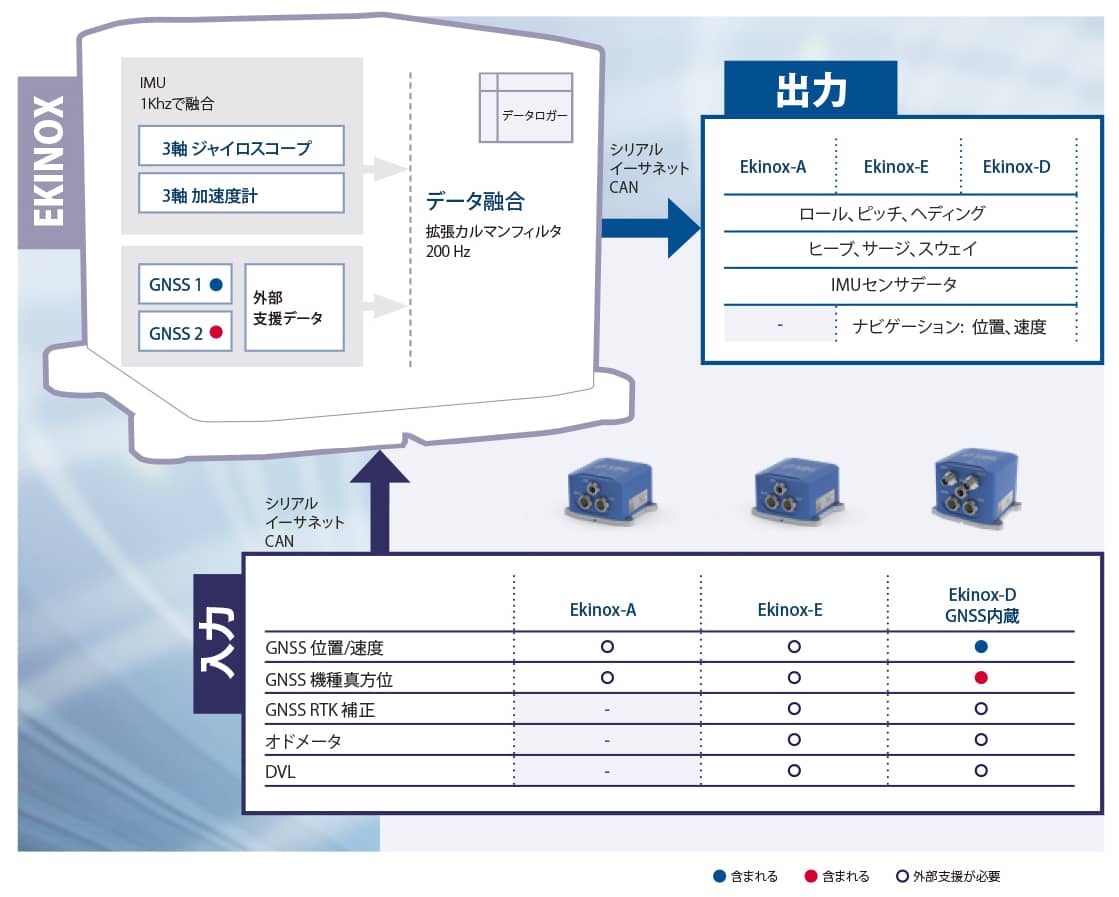
ハイエンドのMEMSセンサと高度な全温度範囲キャリブレーション手順と強力なアルゴリズム設計をうまく組み合わせることにより、コンパクトで軽量、且つ低電力でコストパフォーマンスが高い製品に設計されています。また、Ekinoxセンサには、操作後の分析または後処理用に8GBのデータロガーが組み込まれています。
(OEMバージョンもご用意しております。ご興味がある方は、お問い合わせください。)

概要
ロバストで費用対効果が高いMEMSシステムをタクティカルグレードに
Ekinoxシリーズは高精度慣性システムの製品群です。ロバストで、メンテナンスフリー、そして費用対効果が高いMEMSをタクティカルグレードの慣性センサとして設計されました。最先端のMEMSセンサ、先進のキャリブレーション技術、パワフルなアルゴリズム設計により、Ekinoxシリーズは0.02°姿勢角精度を実現しました。
主な特徴
- 最大4つのデバイスまで接続可能
- サーベイグレードのGNSS レシーバ (Ekinox2-D)
- 8GBのデータロガー
- IP68 防塵防水筐体
- Webインターフェース & イーサネット
- 200Hz出力レート


航空宇宙
中型 & 大型 UAV /航空電子工学/LiDAR/ジャイロ安定化カメラ /フライトデータ・レコーダ
- すぐに使えるINS/GPS(Ekinox-D)
- 厳しい環境用に設計されている
- 全温度範囲でキャリブレーション済み (-40 から 75°C)
- 高振動条件下での比類のない精度(MIL-STD-810G)
- ロバストで、IP68 筐体

マリーン
水路測量/モーションモニタリング/航海性能向上/海洋開発/標的システム
- デュアルアンテナGPS統合による機首真方位 (Ekinox-D)
- 4つのモニターリングポイントにより、リアルタイムに自動ヒーブ計測調整
- NMEA, TSS & Simradプロトコル
- イーサネットとWeb インターフェース

陸上
カーモーション/UGV/カメラと3Dスキャナ/SATCOM アンテナ/マシン制御
- デュアルアンテナGPS、RTK GNSSとオドメータが一体となるソリューション
- イーサネットとCAN接続
- 正確なGPS UTC 同期
- 遅延が少ない(2ms)
- 姿勢とナビゲーションデータが非常に低ノイズ

海中
AUV/ROV/ソナー/LiDAR/カメ
- コンパクトで低消費電力
- DVL等とのリアルタイムにデータ融合
- 最大4つのデバイスと同時接続可能
構造とソフトウェア
最先端の構造
ソフトウェア
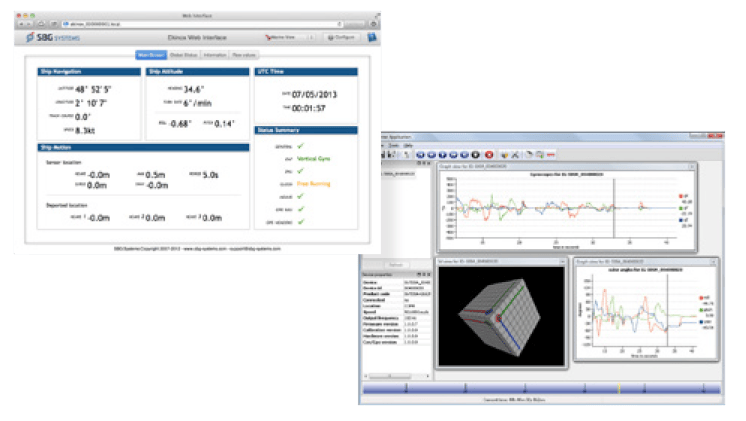
コンフィグレーション、リアルタイムの表示と再生
コンフィグレーションは、直感的に使える組込み型Webインターフェースで行え、全てのパラメータを素早く簡単に表示・調整できます。
sbgCenterソフトウエアはリアルタイムの可視化と、内部データロガーに記録されたデータの再生のための全てのツールを提供します。
ラインナップ
| 製品名 | Ekinox-A | Ekinox-E | Ekinox-D | Navsight Ekinox |
|---|---|---|---|---|
| 製品画像 |  |
 |
 |
 |
| 種類 | AHRS/MRU | INS | INS | INS |
| 仕様 |
|
|
|
|
技術仕様
3D方位
| ロール、ピッチ | 0.03° 0.02° 0.015° |
GNSS 支援 RTK 支援 後処理 |
|---|---|---|
| ヘディング | 0.08° 0.05° 0.03° |
デュアルアンテナ GNSS (ベースライン<2 m) デュアルアンテナGNSS (ベースライン<4 m) 後処理 |
位置
| シングルポイントL1/L2 | 1.2m | |
|---|---|---|
| SBAS | 0.6m | |
| DGPS | 0.4m | |
| RTK | 0.01m | |
| RTK 30s Outage | 3m | 海洋環境 |
| RTK 60s Outage | 0.2%TD 3m |
海洋環境, DVL*支援 自動車モード+オドメータ |
| PPK** | 0.02m | 3m |
ヒーブ
| リアルタイム | 5cm or 5% いずれか大きいほう、速度支援 |
|---|---|
| 波の周期 | 0から20秒自動調整 |
| 遅れ | 2.5cm or 2.5% いずれか大きいほう、速度支援 |
| 波の周期 | 0から40秒 |
* DVL (Doppler Velocity Log) パフォーマンスに依存. -TD: Travelled Distance. -標準 RMS 値
**Post-processing Kinematic 後処理キネマティック
センサ性能
| 加速度 | ジャイロスコープ | ||
|---|---|---|---|
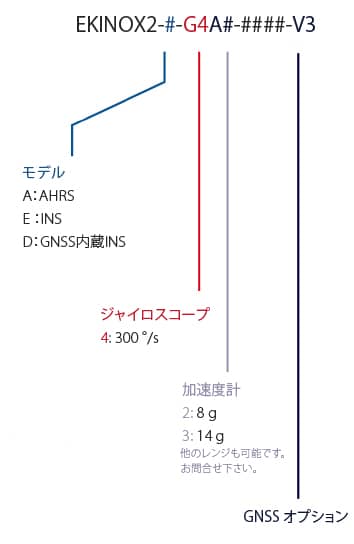
| A2 | A3 | ||
| 計測レンジ | 8 g | 14g | 300 °/秒 |
| ランダムウォーク | 7 μg/√Hz | 30 μg/√Hz | 0.14 °/√hr |
| 動作中バイアス安定性 | 2 μg | 5 μg | <0.5 °/h |
インターフェース
| 支援センサ | 2xGNSS、RTCM、DVL、オドメータ、ジャイロコンパス |
|---|---|
| プロトコル | 出力: NMEA、ASCII、Binary、TSS、Simra 入力: NMEA、Trimble、Novatel、Septentrio、 Hemisphere、Veripos、Fugro、PD0、PD6 |
| 出力レート | 1 から 200 Hz |
| ログ能力 | 8 GB または 48h @ 200 Hz |
| シリアルRS-232/422 | モデルD:2出力/4入力 モデルA/E:3出力/5入力 |
| CAN | 1 CAN 2.0 A/B bus 最大1Mbit/s |
| パルス | 入力: PPS、イベントマーカ最大1kHz 出力:同期出力, トリガ 5入力/2出力 |
| イーサネット | 全二重通信 (10/100 Base T) |
環境仕様
| 動作振動 | MIL-STD-810Gの通り 20Hzから2KHz 加速度計8gタイプ: 3g RMS 加速度計14gタイプ: 8g RMS |
|---|---|
| IP 格付け | IP68 |
| 動作温度 | -40 から 75°C / -40 から 167°F |
| MTBF(平均故障間隔) | 50,000 時間 |
| 動作温度 | EN60945 |

物理的特性
| Ekinox-A/E | Ekinox-D | |
|---|---|---|
| GPS | L1/L2シングルまたはデュアルアンテナ GNSSレシーバ 448チャネル、GPS、GLONASS, GALILEO、BEIDOU |
|
| 重力 | 400 グラム | 600 グラム |
| 寸法 (L x W x H) | 10 x 8.6 x 5.8 cm | 10 x 8.6 x 7.5 cm |
| 消費電力 | < 3W | < 5W |
| 供給電圧 | 9 から 36 VDC | 9 から 36 VDC |
PDFダウンロード
下記より資料をダウンロードできます。