3DM-CV7
高性能なOEM用慣性センサ!
3DM-CV7の慣性計測装置(IMU)、姿勢方位基準装(AHRS) は、タクティカル・グレードの性能を持つ最小、最軽量のOEM用センサパッケージです。3DM-CV7は様々な使用環境において最適の性能を実現するために、個別にキャリブレーションされており、幅広い動作条件下で最適な性能を発揮します。

3DMCV7- 慣性計測装置(IMU)、姿勢方位基準装(AHRS) は、タクティカル・グレードの性能を持つ最小、最軽量のOEM用センサパッケージです。3DMCV7は様々な使用環境において最適の性能を実現するために1つ1つキャリブレーショされています。
パーカー - Microstrain Sensingの自動適応型拡張カルマンフィルタは、最も厳しい環境下でも一貫した信頼できる結果を出すために、新規に設計されました。最先端の方位アルゴリズム、高度な内部時間管理、柔軟なイベント・トリガシステムにより 3DMCV7は、性能に対する価格においても他の追随を許さないセンサになっています。

 1.5°/hr ジャイロ バイアス安定性 |
 低レイテンシ |
 広範囲の 温度キャリブレーション |
 優れた振動除去 |
 拡張カルマンフィ ルタ (EKF) |
 調節可能な サンプリング・レート(1KHzまで) |
 選択可能なレンジ (加速度計& ジャイロ) |
 外部クロック同期 |
 カスタマイズ可能な トリガ・システム |
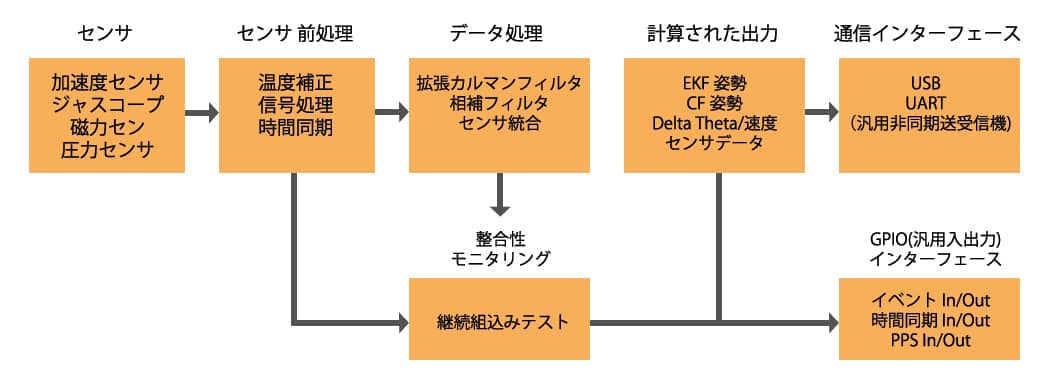
3DM-CV7 システム構成
主な特徴
正確なタイミング
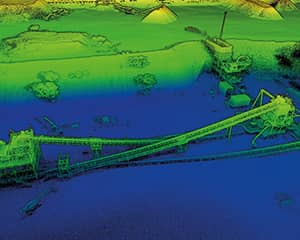
- カメラやLiDARのような外部センサとの時間アライメントを行うための時刻同期の最適化
- 時間に極めて厳密な制御アプリケーションのために最適化された精密なデータのタイムスタンプと低レイテンシ出力
- 全チャンネルについて1 KHz の出力レート

方位推定のための拡張カルマンフィルタ
- 振動の同定と除去を統合的に行う
- IMUバイアス誤差の追跡により従来の相補フィルタより性能が向上
- 直線加速度による姿勢誤差を低減
- 内蔵の地磁気センサにより絶対方位追跡が可能
IMU
- タクティカルグレード・ジャイロ (1.5°/時 バイアス安定性)
- ユーザーが選択可能なジャイロおよび加速度レンジ
- 全温度範囲に対してキャリブレーション済み
- 各ユニットに対する完全なデジタルキャリブレーションレポートの提供
- 整合性モニタリングのための継続組込みテスト

インテグレーション
- 工場出荷時にROS1、ROS2ドライバサポート
- 複数言語 (C++, Python, Matlab, LabVIEW) ソフトウエア・コミュニケーション・ライブラリでカスタムのソフトウエアの開発を簡単に
- 接続キットとUSB サポートで迅速なプロトタイピングが可能に
SWaP-C サイズ、重量、電力、およびコスト
- 旧モデルに比較してより小さく、より省消費電力
- 低価格・量産OEMアプリケーション用に最適化
- アルミ製マウントフレームにより、繊細なMEMS部品を基板トレスから隔離し、はんだ付けモジュールよりも性能を向上
技術仕様
| 加速センサ | ジャイロスコープ | ||
|---|---|---|---|
| IMU | レンジ (選択できます) | ±: 4g, 8g, 16g | ±: 250°/s, 500°/s, 1000°/s |
| ランダムウォーク | 30 μg/√Hz | 8.5°/h/√Hz | |
| バイアス安定性 | 24 μg | 1.5°/h | |
| ゲイン 温度ヒステリシス | 125 ppm | 1000 ppm | |
| バイアス 温度ヒステリシス | 0.6 mg | 0.04°/s | |
| バイアス 繰り返し特性 | 40 μg | 0.004°/s |
| インターフェース | コネクタ | Samtec FTS-105 (2x5) |
|---|---|---|
| 通信インターフェース | UART (TTL), USB | |
| データ出力レート | 1 ~1000 Hz | |
| I/O 入出力 | 4 x GPIO | |
| GPIO 機能 | イベントトリガ、PPS 入力/出力 |
| 計上および電気仕様 | 重量 | 8.3g |
|---|---|---|
| サイズ | 38 mm x 24 mm x 8.1 mm | |
| 電力消費 | 200mW (代表値), 250mW (最大値) | |
| 作動電圧 | 3.2 ~ 5.2 VDC | |
| MTBF 平均故障間隔 | 2,002,026 時間 (Telcordia メソッド, GM/35C) |
| 姿勢性能 | ロール/ピッチ(静的) | 0.25° |
|---|---|---|
| ロール/ピッチ (動的) | 0.5° | |
| ヘディング1 | 2° |
パーカー - Microstrain Sensingは、ロボット・オペレーティング・システム(ROS)用に特に設計しテストされたオープンソースの無料ライセンス(MIT ライセンス)ドライバシリーズを提供しています。ロボットアプリケーション、無人地上走行車―デリバリーロボット/倉庫ロボット/警備ロボットなどの(UGVs)、自己位置推定&環境地図作成(SLAM)などの構築とシミュレーションにご活用ください。