Apogeeシリーズ
- 見積依頼
- お問い合わせ
- 商品カテゴリ
超高性能MEMS 慣性ナビゲーションシステム
非常に低ノイズのジャイロスコープ、少ない遅延、高い耐振動性を備えており、正確な方向と位置のデータを提供するシリーズ製品です。内部拡張カルマンフィルターがリアルタイムの慣性データとGNSSデータに融合し、過酷な環境(橋、トンネル、森林など)でも位置と方向の測定を強化できます。Ekinoxシリーズと同様、Apogeeセンサには、操作後の分析または後処理用に8 GBのデータロガーが内蔵されています。
(OEMバージョンもご用意しております。ご興味がある方は、お問い合わせください。)

概要
正確な軌道と直接地理参照
- GNSS停止中も正確な軌道
- 非常に低ノイズのジャイロスコープ
- 最新世代の3周波 GNSS 受信機
- 8GB データロガー内蔵
陸モバイルマッピング
都市ビル群、森林、トンネルでも堅牢な位置情報は以下の理由で可能になりました。
- 慣性センサとオドメーターとの融合
- リアルタイムとオフラインRTK修正
- 後処理ソフトウェア
- マルチパス環境での最適な位置のためのタイトなGNSS統合
航空測量
高精度のリアルタイム外部オリエンテーションとダイレクトジオリファレンスは以下の理由で可能になりました。
- RTK、TerraStar、またはOmniSTAR修正
- 低いレイテンシ (3 ms)
- 振動に対する高い耐性(ヘリコプターで使用可能)
- 後処理ソフトウェア
最新の使いやすい慣性センサ
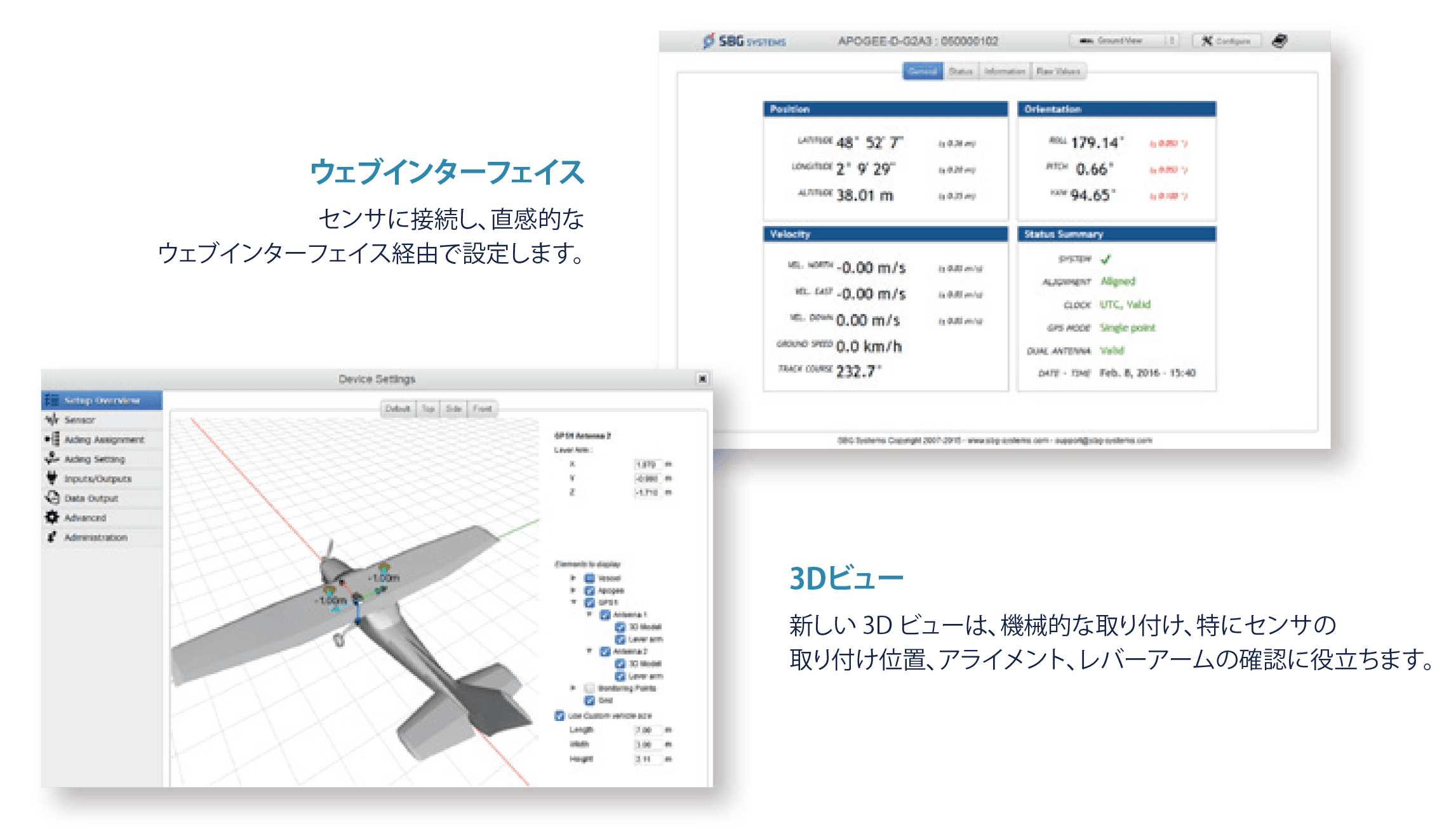
簡単な統合、正確な同期
 |
 |
 |
 |
| コンパクト、軽量&低消費電力 |
イーサネット、RS-232、 |
正確なUTCタイムスタンプ |
最大5つのイベント |
ラインナップ
| 製品名 | Apogee-A | Apogee-E | Apogee-D | Navsight Apogee |
|---|---|---|---|---|
| 製品画像 |  |
 |
 |
 |
| 計測データ | モーション+ヒーブ | 外部GNSS使用ナビゲーション | デュアルアンテナGNSS | デュアルアンテナRTK INS |
| 仕様 |
|
|
|
|
技術仕様
高度と位置:航空宇宙用途
| GNSS L1/L2/L5 | RTK* | PPK** | |
|---|---|---|---|
| ロール/ピッチ | 0.01° | 0.008° | 0.005° |
| ヘディング (デュアルアンテナ:2mベースライン) |
0.04° | 0.04° | 0.02° |
| ヘディング (デュアルアンテナ:4mベースライン) |
0.025° | 0.025° | 0.02° |
| 位置(X/Y) | 1.0m | 0.01m | <0.01m |
| 高度(Z) | 1.0m | 0.03m | <0.02m |
高度と位置:陸用途***
| GNSS L1/L2/L5 | RTK* | PPK** | RTK60秒停止 | PPK60秒停止 | |
|---|---|---|---|---|---|
| ロール/ピッチ | 0.01° | 0.008° | 0.005° | 0.012° | 0.008° |
| ヘディング(シングルアンテナ) | 0.04° | 0.04° | 0.02° | 0.06° | 0.025° |
| 位置(X/Y) | 1.0m | 0.01m | <0.01m | 0.5m | 0.3m |
| 高度(Z) | 1.0m | 0.03m | <0.02m | 0.1m | 0.05m |
* RTK:Real Time Kinematic。リアルタイムキネマティック
** PPK:Post-processing Kinematic。後処理キネマティック
*** オドメーター補助付き
物理的特徴
| モデル | Apogee-A/E | Apogee-D |
|---|---|---|
| 重量 | < 690グラム 1.52ポンド |
< 900グラム 1.98ポンド |
| 寸法(L×W×H) | 130×100×58mm 5.12×3.94×2.28 |
130×100×75mm 5.12×3.94×2.95 |
| 消費電力 | <3W | <5Wシングルアンテナ <7Wデュアルアンテナ |
| 供給電圧 | 9~36VDC | 9~36VDC |
環境仕様
| IP格付け Apogee-A/E/D | IP68(アルミニウム) |
|---|---|
| 指定温度 | -20~60℃/-4~140°F |
| 動作温度 | -40~71℃/-40~160°F |
| MTBF(平均故障間隔) | 50,000時間 |
| 動作振動 | MIL-STD-810G に準拠/20Hz~2kHz 加速度センサ10g:8gRMS |

インターフェイス
| 補助(入力) | 2×GNSS,RTCM,オドメーター |
|---|---|
| プロトコル | 出力:NMEA,ASCII,バイナリ,TSS,Simrad 入力:NMEA,Trimble,Novatel,Septentrio, Hemisphere,Veripos,Fugro,PD0,PD6 |
| 出力レート | 0,1~200Hz |
| ロギング能力 | 8GBもしくは48時間@200Hz |
| シリアルRS-232/422 | Dモデル:出力×2/入力×4 A/Eモデル:出力×3/入力×5 |
| イーサネット | 全二重(10/100base-T) |
| CAN | 1CAN2.0A/Bbus最大1Mbit/s |
| パルス | 入力:PPS,イベントマーカー最大1kHz 出力:SyncOut,トリガー,PPS 入力×5/出力×2 |
センサパフォーマンス
| 加速度センサ | ジャイロスコープ | |
|---|---|---|
| 計測レンジ | 10g | 200°/s |
| 動作中バイアス安定性 | <15μg | < 0.08°/hr |
| ランダムウォーク | <75μg/√Hz | < 0.012°/√hr |
PDFダウンロード
下記より資料をダウンロードできます。