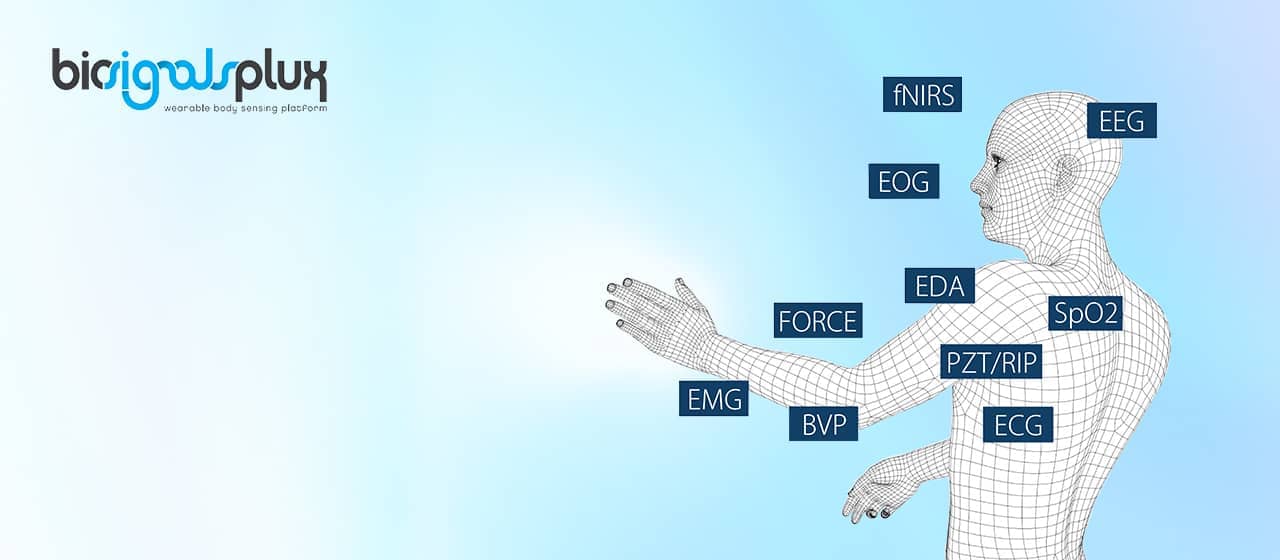
計測システム・センサ リハビリ機器 福祉機器 クレアクト通信 採用情報 会社情報 オンラインショップ 見積依頼 お問い合わせ English 検索 頭からつま先まで!人の動きを可視化するさまざまなセンサ 生体計測、圧力分布、脳波計、モーショントラッキング、アイトラッカー、IMUなどさまざまな計測センサを取り扱っております。 臨床現場に最適なリハビリ機器 歩行・走分析ツールや怪我防止向けのサーモ画像分析、半側空間無視改善のリハビリツールなどを取り扱っております。 Tobii社の視線入力装置 取り扱い多数 重度障がい者向けの視線入力装置や、補装具対応の装置、会話・教育・療養用のソフトなどを取り扱っております。 重要なお知らせ 2024年4月17日 サーバーメンテナンスのお知らせ 2023年12月4日 ドイツnovel社製品 新規取り扱い終了のお知らせ 2023年8月1日 ホームページリニューアルのお知らせ 計測システム・センサ クレアクトでは、圧力分布センサーや生体信号センサー、慣性計測装置(IMU)、アイトラッキング、モーショントラッキング、脳波計測、その他様々な分析・計測システムを取り扱っております。 リハビリ機器 歩行・走分析に適したシステムや、半側空間無視改善ツール、姿勢障害の評価と改善を実現したフィードバック装置など、臨床現場でお使い頂ける機器を取り揃えております。 福祉機器 アイトラッキング世界シェアNo.1、スウェーデン・Tobii(トビー)社の重度障がい者向け視線入力装置マイトビーをはじめ、学習ソフトやリハビリツールなど、様々な福祉機器をご紹介します。 イベント イベント一覧へ クレアクト通信 2024年3月21日 福祉機器ブログ 私がGomiPages(ゴミページ)を開発、提供する理由 2023年11月19日 活用事例 ご研究に適した脳波計のご紹介 2023年10月18日 輸入販売ブログ Plux社の生体信号処理について クレアクト通信一覧へ 新着情報 2023年12月4日 お知らせ 圧力分布計測 pedarファイナルセールのお知らせ 2023年11月27日 お知らせ 2ndLabo掲載のお知らせ 2023年10月3日 商品情報 マイトビーI-16 20%offキャンペーン 新着情報一覧へ