農業分野における自動運転と慣性ナビゲーションシステムの最適化
2025年12月2日

原著:Aidan Laracy, Field Application Engineer (MicroStrain by HBK) / 和訳:株式会社クレアクト
自動運転農業のメリット

自動運転型農業は、農家と環境の双方に多くのメリットをもたらします。
農作業を自動化することで効率が向上し、生産性向上や廃棄物削減に寄与します。加えて、播種・定植、農薬散布、収穫といった作業を自動化することで、農作業者のコストやリソース消費の削減につながります。
さらに、自動化によって危険な作業環境での手作業が減り、農作業者の安全性と健康リスクの低減にもつながり、農作業者のウェルビーイングが改善します。
これらのメリットに加え、自動運転型農業にはいくつかの課題も伴います。特にリアル・タイム・キネマティクス(RTK)慣性ナビゲーションシステム(INS)においては、木々、森の周辺での運用によるGNSS信号の劣化、農機による大きな振動、場所が限られるなどの難しいセンサ設置の制約などが挙げられます。ある3DM-GQ7-GNSS/INS(デュアルアンテナGNSS慣性センサ)ユーザーも、まさにこれらの課題のすべて樹木が適度に覆う環境下での運用、振動の大きい領域への慣性センサ設置、空(GNSS衛星)への見通しが中途半端な場所へのアンテナ設置などに直面しました。ユーザーは、こういったGNSS環境が理想的でない状況でも求められる位置精度と方位精度を確保するために、MicroStrain社に改善策を相談しました。
要求された精度は、位置0.1m(1σ)・方位1°(1σ)で、これは自動運転型農機が連続稼働中に意図した軌道を維持するためのものです。これを踏まえて実験計画を策定し、最も厳しい場所の一つで実験を実施しました(図1参照)。
作物は大きな木で栽培され、葉の間隔は約30cm~60cm(2〜3ft)であり、GNSSにとって非常に厳しい環境でした。
MicroStrain社は、この特殊で困難な環境において慣性ナビゲーション問題のどの部分が改善可能かを特定するため、慎重に実験を計画し、その結果、慣性ナビゲーション性能を劇的に向上させる数点の改良点を発見しました。
マルチパス干渉への対処
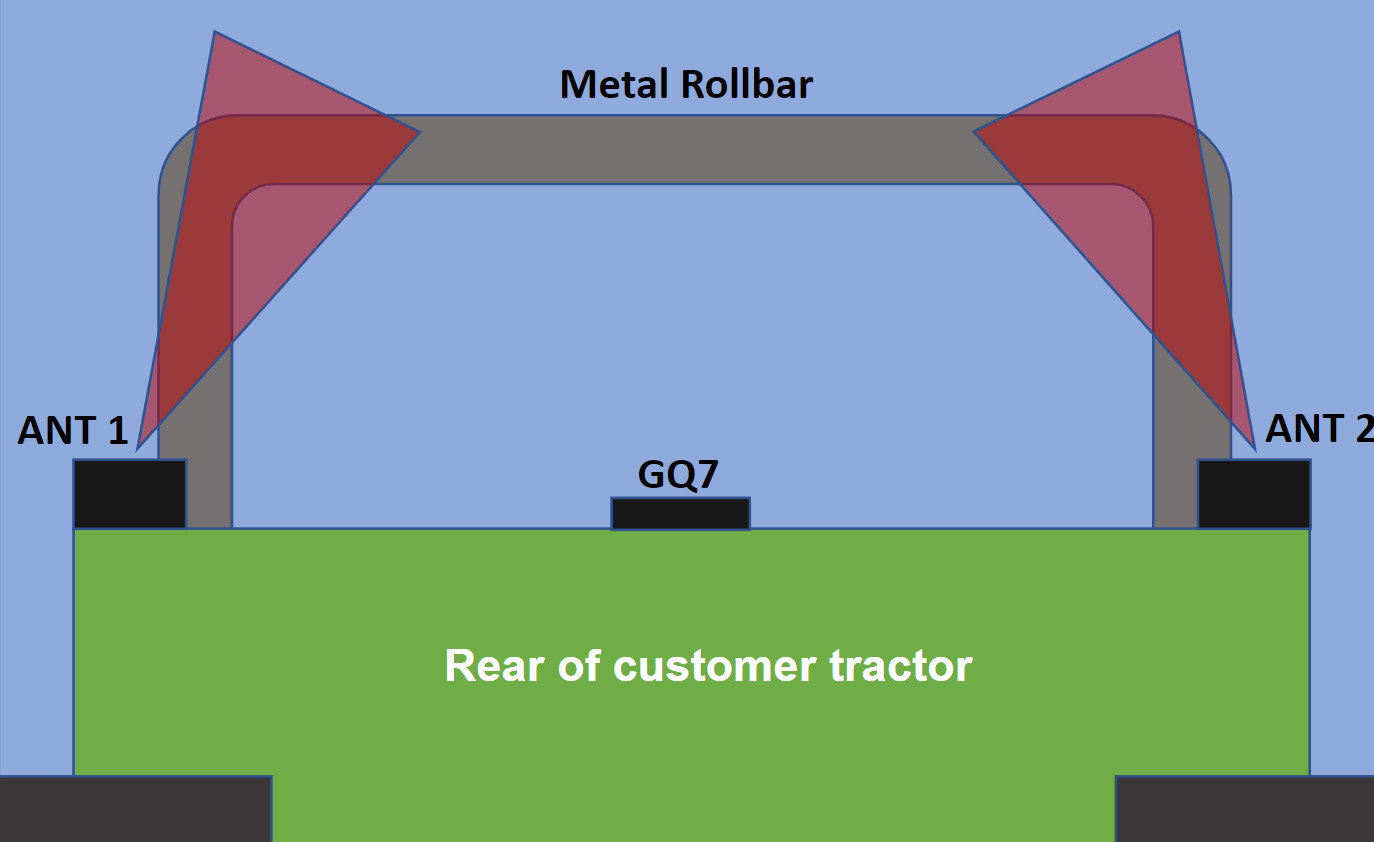
設置状況を調査したところ、GNSSアンテナがトラクターのアンテナの空の見通しが部分的に遮られる部分に取り付けられており、トラクター自身による自己誘発的なマルチパスの懸念がありました。
マルチパスとは、都市部でよく発生する1つのGNSS信号が高層ビルなどに当たり反射し複数の経路でGNSS受信機に到達する現象です。しかし、その反射対象は必ずしも建物とは限らず、車両自身の構造物が原因になることもあります。これによりGNSS衛星からの疑似距離測定に誤差が生じ、位置精度が低下します。
右図に、ユーザーが直面した設置上の課題の一例を示します。
アンテナの配置
アンテナの設置位置は、正確なRTK測位とデュアルアンテナ方位解を得るために極めて重要です。
アンテナは、空を遮るものがない状態に設置する必要があります。
本アプリケーションでは、アンテナはトラクターに設置されましたが、両アンテナの空の見通しの一部がトラクターのロールバーによって遮られていました(設置位置1)。
アンテナ1:右半分の空がロールバーで遮蔽
アンテナ2:左半分の空がロールバーで遮蔽
デュアルアンテナ方式では、両アンテナが同一衛星を観測できることが前提ですが、この配置では難しく、方位推定に大きな影響が出ます。
加えてロールバーは反射源ともなり、マルチパス誤差を増大させます。
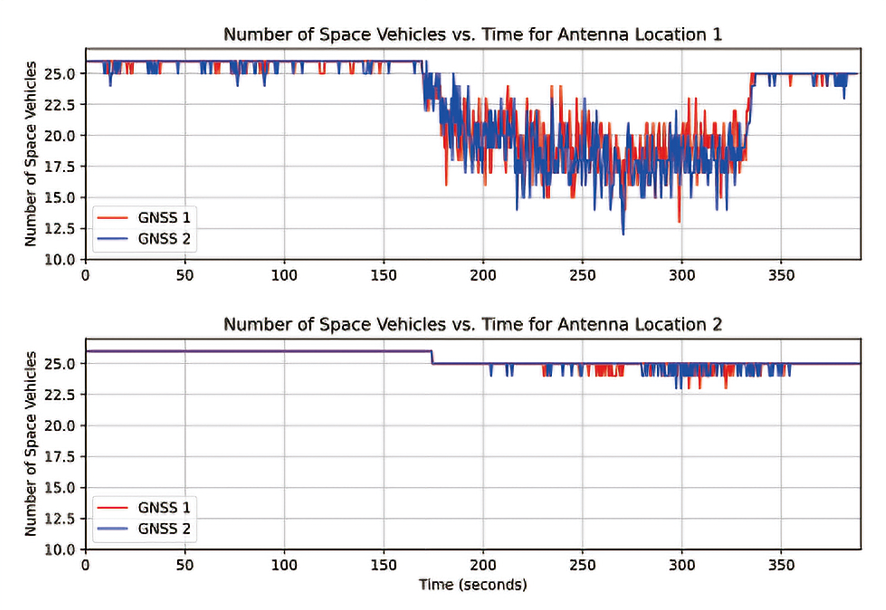
樹冠外では影響が小さいものの、図3の170秒~330秒の樹冠内では影響が顕著でした。そのため、アンテナをより見通しの良い位置(位置2)へ移動することを提案し、テストの結果、視野内に入る衛星数が大幅に増加しました(上図)。
アンテナの品質
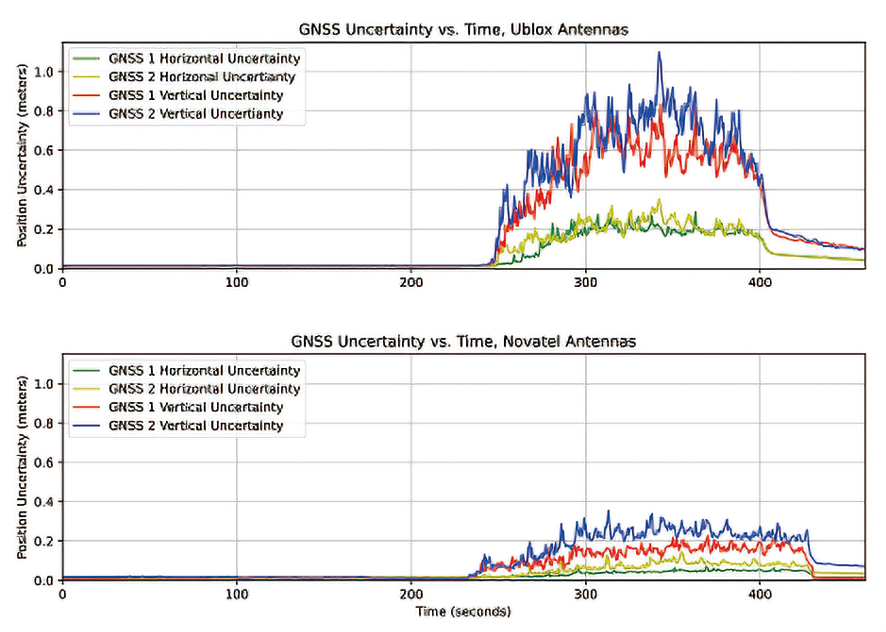
標準付属のUblox ANN-MBアンテナは高性能かつコスト効率のよい選択肢ですが、マルチパスの多い環境ではより高性能なアンテナが有効です。
サーベイグレードの Novatel VEXXIS GNSS-850 は、外部電源を必要としますが、マルチパス除去能力と高いS/N比を持ち、樹木が密集した環境で特に有利でした。
右図の通りUbloxからNovatelアンテナに変更したことにより、
・Ublox:水平0.35m、垂直1.10m
・Novatel:水平0.14m、垂直0.35m
と、大幅な位置精度の改善が示されました。
振動
農機は大型エンジンと多様な回転工具を備えるため、数多くの振動源が存在することになります。
こういった振動はMEMSベースの慣性ナビゲーションシステム(INS)にとって大きな課題であり、システムの精度と性能に悪影響を及ぼします。
振動はセンサーのドリフトを引き起こし、位置および姿勢測定の誤差を生じさせます。
こうした誤差は、特に精密な位置決めが不可欠な動的環境において、慣性ナビゲーション上の誤差につながる可能性があります。
振動対策
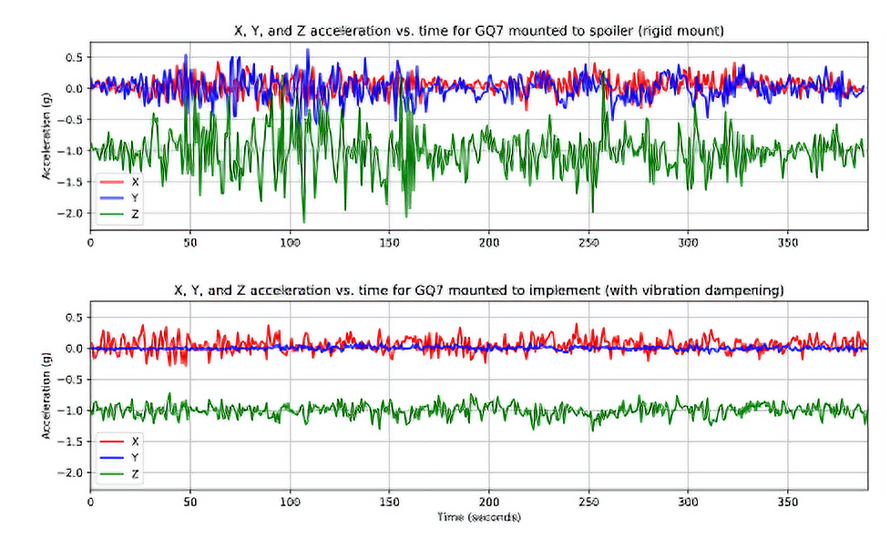
最良の振動対策は 振動源から物理的に遠ざけることです。
本アプリケーションでは、GQ7はトラクターの振動を直接受ける箇所に取り付けられましたので、センサーをトラクターの振動から離れた箇所に移動することを推奨しました。
GQ7の適応カルマンフィルタは振動補正機能を備えていますが、機械的に振動を減らす方がより効果的です。
その理由として、振動環境下ではGQ7の適応カルマンフィルタがIMU測定値への信頼度を低下させ、誤ったGNSS測定値への反応を強めるためです。
樹冠下でGNSS測定値が乱れると、フィルタ処理の結果が不必要に大きくずれることになる。
センサー取り付け位置を変更することが困難な場合には、防振ゴムマウントを使用してセンサーを車両に固定することをも可能です。防振ゴムは振動を吸収し、より優れたカルマンフィルタ解を得ることができます。
RTK補正にローカルベースステーションを使用する
RTK補正は、GNSSアプリケーションにおいてcm級の測位精度を可能にします。作物の列間を移動する際、農機が周囲の作物と衝突しないようにするために極めて重要です。
RTK補正は固定基地局から発信され、様々な方法でRTK対応GNSS受信機にリアルタイムで送信されます。本アプリケーションでは、RTK補正は当該地域のCORS固定基地局から取得されていました。
RTK基地局からの位置精度は、受信機が基地局から離れるほど低下します。経験則として、基地局からの距離が10km離れるごとに精度が1cm低下します(よって1cm+1ppm精度)。
例:基地局から50km離れている場合、期待できる最良の位置精度は6cmとなります。
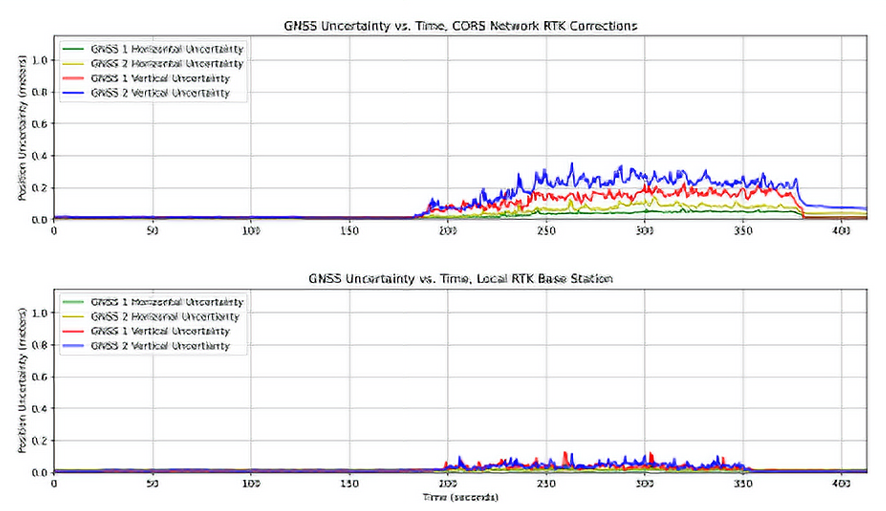
この地点で通常使用されるCORS固定基地局が運用エリアから約20km離れていたため、距離に基づく誤差を可能な限り低減するため、独自のRTK基地局の利用を提案しました。その結果得られた位置精度の改善は図6に示す通りであり、CORS固定基地局では水平方向と垂直方向のGNSS位置不確かさの最大値がそれぞれ0.14メートルと0.35メートルであったのに対して、独自のRTK基地局ではそれぞれ0.07メートルと0.13メートルと改善しました。
特筆すべき点としては、木々の無い環境では位置精度がほぼ同等であったのに対し、木々のある環境では独自にRTK基地局がはるかに優れた位置精度を提供することができ、これは地図上の農機の軌跡の観測でも確認されました。この結果、GNSS受信が困難な環境では独自のRTK基地局の活用を強く推奨致します。
結論
自動運転型農業の導入において、特に中~高密度な樹木環境で直面する課題は、システム性能向上のために主要因に対処することの重要性を浮き彫りにしています。MicroStrain社の実験と提案を通じて、マルチパス干渉や振動への効果的な対策、RTK補正の改善による最適化までの実現戦略を実証しました。
GNSSアンテナ位置の最適化、サーベイグレードアンテナの採用、センサの振動対策、RTK補正のための独自基地局の活用により、慣性ナビゲーションシステムの精度向上において大幅な改善を達成しました。これらの対策は自動運転型農業アプリケーションにおける自動運転性能の向上、効率性と安全性の増進に寄与します。
自動運転型農業プロジェクトを次の段階へ進める準備はできておりましでしょうか。
MicroStrain社のエキスパートチームが、最適な慣性ナビゲーションシステムの選定を支援し、最も過酷な環境下でも最高の性能を発揮できるようサポートします。
具体的な要件についてご相談をお待ちしております。