IMUってなんぞ?part10:ここまでのまとめ(VRU,VG)
2018年9月13日
猫背なのにつま先に手が届かない鬼塚です。
前回、唐突にオイラー角について解説し始めましたが、要するにこれはモノの姿勢(どのくらい傾いているか)を表していました。
実は、センサーは「オイラー角」そのものを直接計測しているわけではなく、加速度センサと角速度センサを組み合わせて計測された値から計算して求めています。
どちらかのセンサだけでもいちおう姿勢は求められるようですが、複数の違うセンサを組み合わせることで精度が向上します。これを「センサーフュージョン」と言います。
変なダンスをしながら互いの人差し指をくっつけてもオイラーさんは出現しません。
あやしい儀式を執り行って失敗しても弊社は責任を負いかねますことご了承ください。
センサの呼び方の話しに戻りますが、このように加速度と角速度センサを搭載し、オイラー角が出力できるようなものとしての名称があります。センサーを作っているメーカーによってあれこれ勝手に定義しているようで、統一感があまりないですが、例えば
VRU(Vertical Reference Unit:垂直基準ユニット)
VG(Vertical Gyro:垂直ジャイロ)
とかです。
VRUについては、弊社で取り扱っているLORD社の3DM-GX5-15もこのような表記をしています。
http://www.microstrain.com/inertial/3DM-GX5-15
心に余裕のある方はこちらのページの「DATASHEET」をクリックしてみてください。
センサの仕様についていろいろと書いてありますが、2ページ目の表に「Accelerometer(加速度センサ)」と「Gyroscope(角速度センサ)」があるはずです。
ここでそれぞれの動きをおさらいしておきましょう。
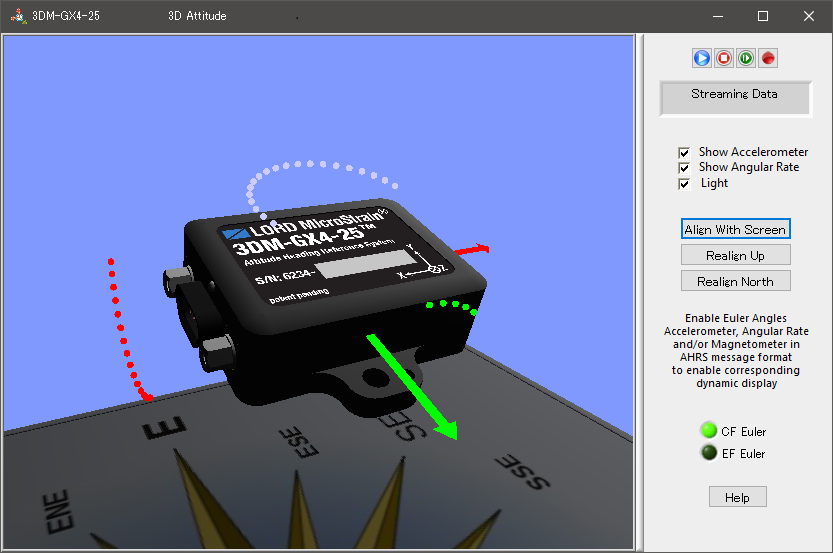
センサを前後上下左右に動かしたときが加速度(矢印)
回転させたときの速度(回転量)が角速度(点線の輪っか)
そして、現在のセンサの傾きがオイラー角です。(この図だとちょっとわかりにくいですが...)
計測しているデータはセンサに定義された軸の方向に対しての量で出てきますが、下記のように軸の数でセンサを表すこともあります。
3軸センサー(加速度 3軸)
6軸センサー(加速度 3軸 + 角速度 3軸 )
9軸センサー(角速度 3軸 + 角速度 3軸 + 地磁気 3軸)
さて、さり気なく「地磁気」という名前が出てきていますが、これはなんに使うのでしょうか???
次回は磁界のお話をしたいと思いますのでお楽しみに!